
Should Robots Look Like Us?
Robots are having a moment. Everyone’s bolting “AI” onto something and calling it the future. At CES last week in Las Vegas, a lot of that future wore a humanoid skin – robots shaped like us, moving like us, trying to do our jobs. And honestly? Most of it looked slow, clunky, and painful to watch.
Look behind the curtain though, and you find a different story. Many industries have been using robots for years to build and move things – at scale, at speed, and definitely not in human form. So the real question isn’t just “can they look like us?” but “should they?”
The CES Humanoid Show
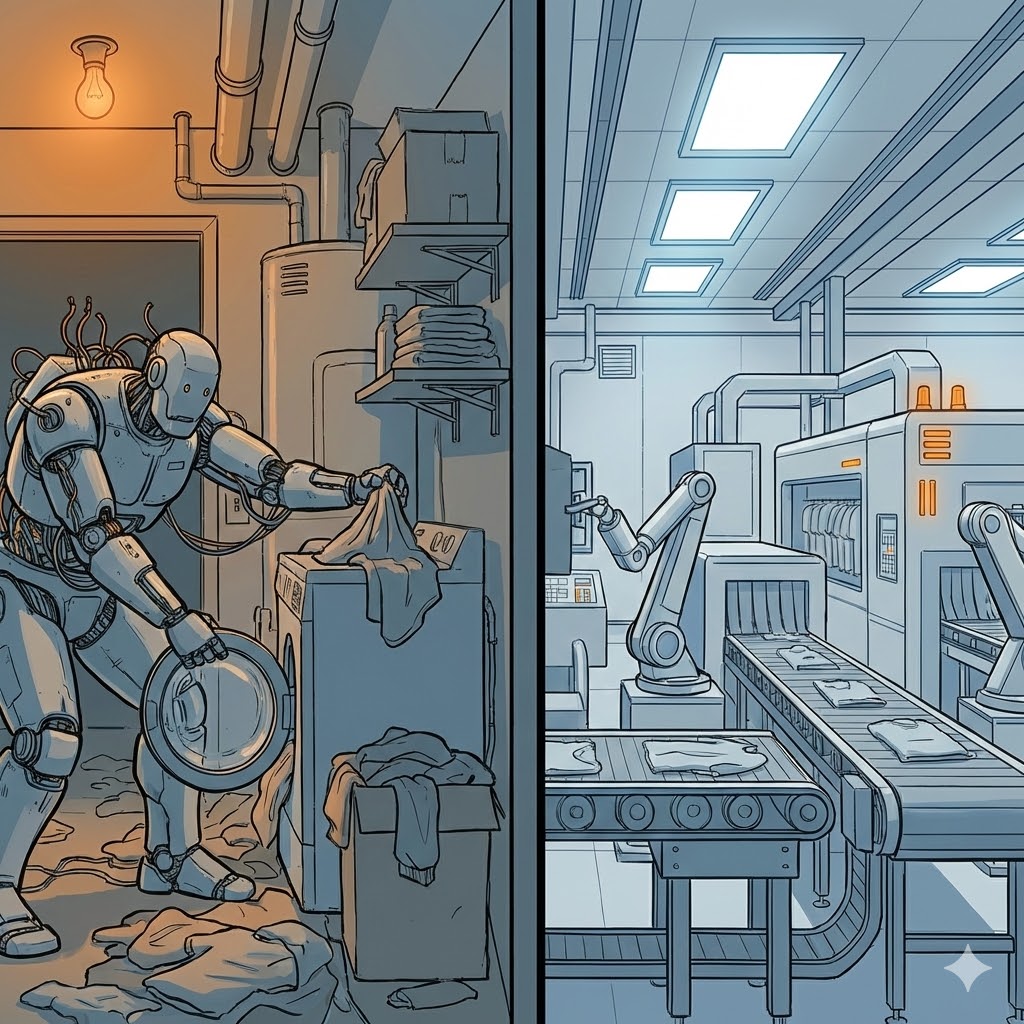
Walking around CES 2026, the pattern was obvious: humanoid robots doing “human” tasks. Folding laundry. Loading washers. Carrying boxes. Pouring drinks. Demo after demo, the pitch was “look, this robot can do what a person does.”
But watch for a minute and the cracks show up. Humanoid robots loading washers took 30+ seconds for simple motions. Opening a door, rotating a basket, placing clothes – things you don’t even think about – suddenly became multi-step choreography. Some robots missed items, fumbled with doors, or needed carefully staged setups so the demo wouldn’t fall apart.
The form factor is familiar, sure. But the performance isn’t. Two legs are hard. Balance is hard. Moving in cluttered spaces is hard. And copying the human body exactly means inheriting all those hard problems before you even get to the actual work you want done.
The Hidden Reality: Robots Already Run the Back End
Compare that with what’s happening in factories. Industrial robots aren’t some future tech – they’re the backbone of how the world’s stuff gets made. By late 2025, roughly 4.66 million industrial robots were operating worldwide, with hundreds of thousands more added every year.
These robots don’t look like people. They’re articulated arms, gantries, mobile platforms, automated guided vehicles. In auto plants, robots weld, paint, assemble, and move heavy components with repeatable precision. In electronics, they place components on circuit boards faster and more accurately than any human hand.
Then there are collaborative robots – “cobots” – designed to work right beside people. They handle repetitive, fatiguing tasks while humans focus on judgment calls, exceptions, and creative problem-solving. Studies show cobots reducing idle time and improving throughput dramatically in mixed human-robot lines.
And “dark factories” in places like China run almost entirely unattended. Machines and robots operating in the dark because no humans need the lights on. Very few humanoid shapes here – just purpose-built machines doing exactly what they were designed for.
So while the public conversation (boosted by generative AI hype) is stuck on “when will robots come into my house?”, the industrial world already answered a more practical question: “what’s the best machine for this job?”
Form Follows Process… Or Process Follows Form
This gets to the core design problem: are we trying to drop robots into human-shaped processes, or are we willing to reshape the processes for robots?
If the goal is to take the exact way a human does a task and have a robot do that same sequence in the same space with the same tools, then humanoid form starts to make sense. Your home, your workplace, your city – everything from countertop height to door handles assumes a human body. If a robot is going to be your stand-in, especially in legacy environments, it helps if it can reach the same shelves, grab the same knobs, walk through the same doors.
That’s the “replacement” mindset: the robot steps in so a human doesn’t have to, and if the robot fails, a human can step back in with no changes to the setup. Familiarity and trust matter too. A vaguely human-shaped robot in your kitchen or care facility feels more socially acceptable than a ceiling-mounted octopus arm or a rolling box with claws – at least for now.
But if the goal shifts from “do it the way we do it now” to “what’s the best way to get this done if we’re designing around machines?”, the answer changes fast. Wheels are usually more stable and energy-efficient than legs. Fixed arms on rails can be faster and more precise than free-walking bodies. Swarms of small units can outperform a single big humanoid in sorting, moving, and organizing tasks.
In other words: if we’re willing to redesign the process, the human body plan stops being the gold standard and becomes just one option among many.
The Home Problem: Retrofitting Robots Into Human Spaces
Homes make this tension obvious. Your kitchen, laundry room, hallway – they’re all built for a particular kind of user: a human with roughly human reach, height, and dexterity. Stoves, countertops, washer doors, cupboard handles, even stair dimensions are all tuned to that shape.
That’s why so many consumer robot concepts go back to humanoid form. It feels like the only way to drop a machine into your existing home without ripping everything out. A humanoid can (in theory) walk to your washer, open the door, grab clothes from a basket, and press the same buttons you do. You don’t need to re-plumb, rewire, or rebuild.
But those CES demos show the tradeoff clearly: the more we force robots to work like we do, in spaces built exactly for us, the more performance we give up. Slow, clunky, error-prone – especially when the environment is unstructured.
And realistically, most people aren’t going to redesign their house around a robot. You might add a smart speaker, a thermostat, maybe a smart lock. You’re probably not knocking down walls or rebuilding your laundry room layout just to make life easier for a machine.
So if homes are mostly fixed, but we still want robots to do more work, the question becomes: do the robots really need to be in the home at all?
What If Robots Didn’t Come Home?
Here’s a different model: instead of bringing robots into every home, what if we built robot-optimized centers and lightly adjusted our habits to use them?
Take laundry. Right now, every home duplicates the same stack: washer, dryer, maybe a drying rack, some detergent on a shelf. The humanoid-robot pitch is “let’s place a robot in that room so you don’t have to bend over and do it.” But you could also say:
- Throw your dirty laundry into a bag
- Drop it in a chute in your building, or into a drop box on your way to work
- On the other end is a facility purpose-built for robots
Inside that facility, nothing is human-shaped. Conveyors move bags. RFID tags or computer vision systems handle sorting by color, fabric, or customer. Grippers optimized for garments feed washers and dryers arranged purely for throughput, not human access. Folding robots that struggle in cramped, ad-hoc environments suddenly get straight-line tables, perfect lighting, and standardized garments.
By the time you’re driving home, you swing through, tap your phone, and your laundry – washed, dried, folded, maybe even hung – is ready for pickup. Or it gets delivered. You never needed a robot in your house. You just needed a better pipeline.
Same idea for food. Instead of a humanoid robot awkwardly chopping onions in your kitchen, imagine:
- You submit your recipes and preferences to a meal center
- Robots in a warehouse-style kitchen portion, cut, cook or pre-cook, and pack your meals using equipment optimized for them, not for you
- You pick up or receive fully prepped, ready-to-heat meals that match your diet and taste
Again, you get the benefit – time saved, consistent quality, lower cost – without needing to rebuild your house or accept a big humanoid roommate walking around your kitchen.
How Centralized Hubs Unlock Better Robot Designs
Once you move the work out of the human home and into dedicated centers, the design constraints open up. You no longer care if the machine looks remotely human. You care about speed, reliability, maintainability, cost, and safety for the workers who supervise or service the system.
That’s exactly what industrial and logistics robotics already do. Laundry facilities are rolling out automated sorting systems using conveyor lines, scanners, and mechanical diverters – zero humanoid bodies in sight. Meal-kit and food production companies use robotic arms to fill, seal, and pack thousands of servings per shift, tuned around conveyor belt layouts and ingredient bins.
Compare the setups side by side and the advantages of specialized, non-humanoid forms in centralized hubs are obvious:
| Scenario | Robot Form | Environment | Strengths | Weaknesses |
|---|---|---|---|---|
| In-home “butler” | Humanoid with legs | Unstructured, varied | Familiar, can (in theory) use your stuff | Slow, complex, expensive |
| Factory/cobot line | Arms, AGVs, gantries | Structured, fixed | Fast, precise, proven at scale | Industrial only |
| Service robot hub | Wheels, grippers, swarms | Semi-structured | Highly optimized for specific tasks | Requires drop-off/pick-up habits |
In hubs, you can also stack benefits across many users. One set of highly optimized machines can serve hundreds or thousands of households. That’s a very different cost curve than selling every family its own humanoid to struggle in a cramped laundry room.
People, Trust, and Where Humanoids Still Matter
That said, humanoid robots aren’t pointless. They just belong in specific roles. Anywhere the human relationship is part of the job – elder care, companionship, certain front-of-house services – a more human-like presence can help some people feel at ease, at least initially. It isn’t so much that everyone loves staring into digital eyes, but that things like gaze, gestures, and shared “body language” change how willing we are to treat a machine as a social partner when trust and emotional comfort are part of the work.
In those settings, speed and raw efficiency aren’t everything. Moving a bit slower but more predictably can actually be a feature, not a bug. A humanoid-ish care robot that helps with mobility, reminders, or light tasks in a home or facility might be worth the extra complexity because that social layer – the sense that “this thing is here with me” – is doing work a faceless box on wheels would struggle to do, even if the box is technically more capable.
So the split looks like this:
- Humanoid or semi-humanoid robots where human interaction is central – care, education, hospitality, maybe some kinds of in-home assistance
- Non-humanoid, specialized robots in hubs, factories, and infrastructure, where the end user just cares about results and cost
So… Should They Look Like Us?
If the goal is to have robots do their best work, the answer most of the time is no. They shouldn’t have to look like us. They should look like whatever shape, locomotion, and toolset are best for the job and the environment they’re in. Wheels, rails, arms, drones, swarms – forms that would look completely out of place in a living room but are perfect in a facility built for them.
But if the goal is to share our personal spaces, to build trust, or to plug into environments that are deeply, expensively human-shaped, then “looking like us” still has a role. It’s just not the whole story, and probably not even the main one.
The more comfortable we get with the idea that robots don’t have to walk through our front door to make our lives easier – that our laundry, meals, and other chores can quietly disappear into chutes and hubs designed for machines – the freer robot design becomes. And the more likely it is that robots will stop looking like awkward humans trying to copy us, and start looking like what they really are: tools that extend what we can do, in shapes that make sense for them, not just for us.
** I did write this with AI. I was never a strong writer ever and through editing these articles I hope to get incrementally better. I blurbed out a ton of my thoughts on the matter and AI and I went through it all piece by piece to make it fit together so it could make more sense to you. ~D